La inteligencia colectiva de las hormigas sirve a estos robots-hormiga para escapar de una prisión sin plan ni planificador
Las hormigas individuales son criaturas relativamente simples y, sin embargo, una colonia de hormigas puede realizar tareas realmente complejas, como la construcción y defensa de sus nidos, o la búsqueda de comida a grandes distancias.
Recientemente, unos investigadores de Harvard se han inspirado en las hormigas y termitas para diseñar un equipo de robots relativamente sencillos que pueden trabajar colectivamente para realizar tareas complejas utilizando sólo unos pocos parámetros básicos. La investigación se publicó en ELife.
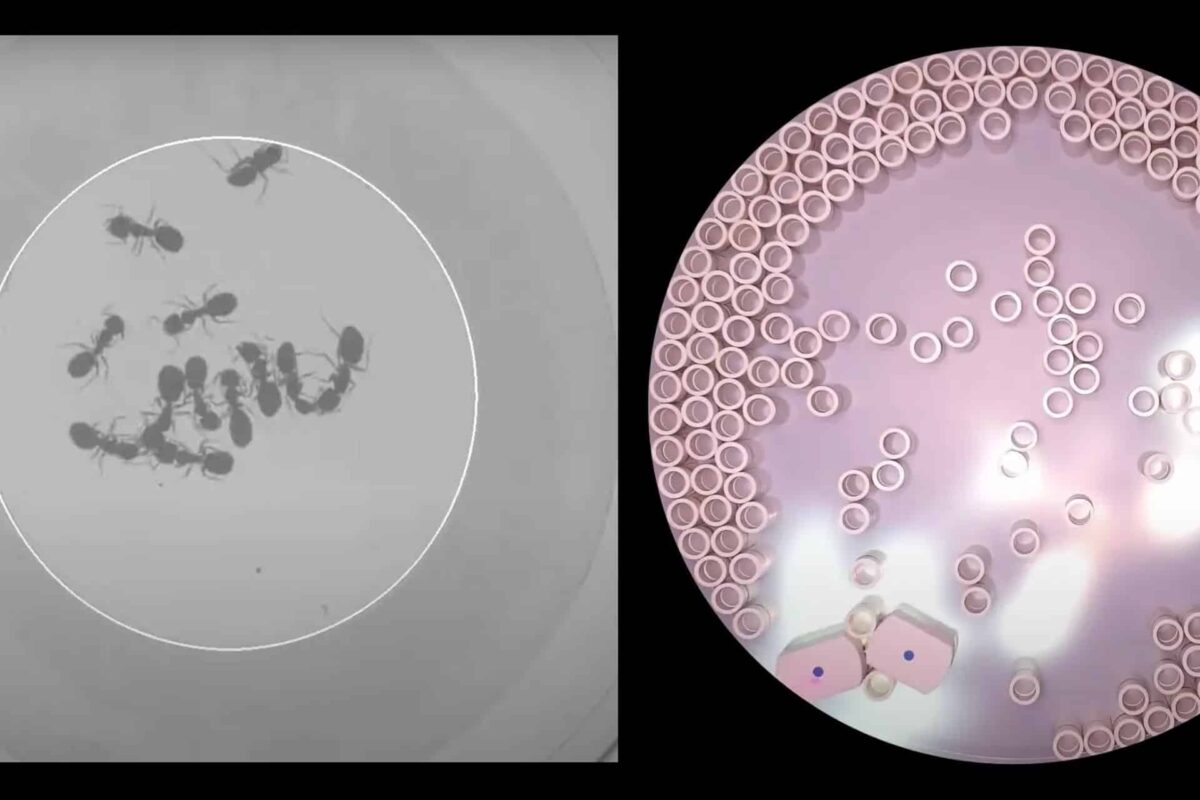
El equipo de investigación empezó estudiando cómo las hormigas carpinteras negras trabajan juntas para excavar y escapar de un recinto blando. Al principio, las hormigas dentro del recinto se movían al azar, comunicándose a través de sus antenas, antes de empezar a trabajar juntas para escapar.
Las hormigas utilizan principalmente sus antenas para interactuar con el entorno y con otras hormigas, un proceso denominado antenación. Los investigadores observaron que las hormigas se congregaban espontáneamente alrededor de las zonas en las que interactuaban con más frecuencia. Con el tiempo, la excavación en uno de esos lugares fue más rápida que en los demás y las hormigas acabaron excavando túneles fuera del recinto.
A partir de estas observaciones, Mahadevan y su equipo identificaron dos parámetros relevantes para entender la tarea de excavación de las hormigas: la fuerza de la cooperación colectiva y el ritmo de excavación. Las simulaciones numéricas de los modelos matemáticos que codifican estos parámetros demostraron que las hormigas sólo pueden excavar con éxito cuando cooperan entre sí con suficiente fuerza y, al mismo tiempo, excavan con eficacia.
A partir de este conocimiento y basándose en los modelos, los investigadores construyeron hormigas robóticas, apodadas RAnts (de Robotic Ants), para ver si podían trabajar juntas para escapar de un recinto similar. En lugar de feromonas químicas, las RAnts utilizaron «fotormonas», campos de luz que dejan las RAnts errantes y que imitan los campos de feromonas o la antenación.
Los RAnts sólo estaban programados mediante sencillas reglas locales: seguir el gradiente del campo de fotoromonas, evitar a más robots donde la densidad de fotoromonas era alta y recoger obstáculos donde la densidad de fotoromonas era alta y soltarlos donde la densidad de fotoromonas era baja. Estas tres reglas permitieron a las RAnts escapar rápidamente de su confinamiento y, lo que es igual de importante, también permitieron a los investigadores explorar regiones de comportamiento difíciles de detectar con hormigas reales.
Este planteamiento es muy flexible y resistente a los errores de detección y control. Podría ampliarse y aplicarse a equipos de docenas o cientos de robots que utilicen distintos tipos de campos de comunicación. También es más resistente que otros métodos de resolución colaborativa de problemas: aunque fallen algunas unidades robóticas individuales, el resto del equipo puede completar la tarea.
REFERENCIA
Dynamics of cooperative excavation in ant and robot collectives



