
Un equipo de investigadores ha diseñado un guante para humanos que imita los tentáculos de un pulpo
El trabajo se ha publicado en Science Advances.
Un equipo de investigadores dirigido por Michael Bartlett, de Virginia Tech (Instituto Politécnico y Universidad Estatal de Virginia, EE UU), ha desarrollado un guante inspirado en un pulpo, capaz de agarrar objetos bajo el agua de forma segura.
La mano humana no sirve bajo el agua
Los seres humanos no estamos capacitados para prosperar en un entorno submarino. Usamos tanques para respirar, trajes de neopreno para proteger y calentar nuestros cuerpos y gafas para ver con claridad. Nuestras manos y dedos terrestres tampoco están bien equipados para sujetar o agarrar cosas, como sabrá cualquiera que haya tratado de sujetar un pez dentro del agua.
Los buzos de rescate, los arqueólogos submarinos, los ingenieros de puentes y los equipos de salvamento utilizan sus manos para rescatar personas o coger objetos del agua. A menudo se utilizan pinzas metálicas para estas tareas submarinas. Pero, cuando se requiere un toque delicado, sería útil contar con manos hechas para el agua.
Una poderosa adhesión
El pulpo es una de las criaturas más singulares del planeta, equipado con ocho largos brazos que pueden agarrar innumerables cosas en un entorno acuático. Sus tentáculos están equipados con ventosas controladas por los sistemas muscular y nervioso del animal.

Recreación de las ventosas de un tentáculo de pulpo. Cortesía VIRGINIA TECH
Cada ventosa, con la forma del extremo de un émbolo, tiene una poderosa capacidad de agarre. Su ancho borde exterior se sella al objeto, los músculos se contraen y relajan el área ahuecada detrás del borde para agregar y liberar presión.
El pulpo controla más de 2.000 ventosas, distribuidas en ocho brazos, con sensores químicos y mecánicos.
Un diseño para humanos
Para diseñar su guante, los investigadores se centraron en imaginar las ventosas: tallos de goma cubiertos con membranas suaves accionadas. El diseño fue creado para realizar la misma función que la ventosa de un pulpo.
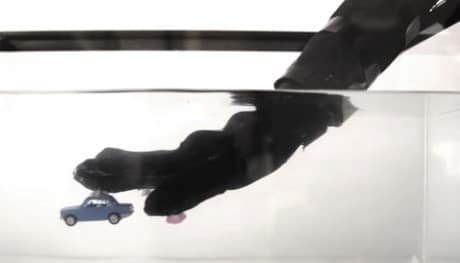
El guante sujetando un pequeño cochecito de metal.
El guante lleva sensores ópticos de proximidad micro-LIDAR que detectan cómo de cerca o lejos está un objeto. Las ventosas y los sensores LIDAR se conectaron imitando así los sistemas nervioso y muscular de un pulpo.
Además, el uso de sensores para acoplar las ventosas también hace que el sistema sea adaptable.
Rocas y percebes
En un ambiente natural, un pulpo enrolla sus brazos alrededor de peñascos, rocas y superficies, adhiriéndose a caparazones lisos y percebes ásperos.
El equipo de investigación buscaba algo que resultara natural para los humanos y les permitiera recoger cosas sin esfuerzo, adaptándose a diferentes formas y tamaños como lo haría un pulpo.
Su solución fue un guante con ventosas sintéticas y sensores estrechamente integrados, una armonía de sistemas portátiles que agarran muchas formas diferentes bajo el agua. Lo llamaron Octo-guante.
En las pruebas, los investigadores ensayaron algunos modos de agarre diferentes. Para manipular objetos delicados y livianos, usaron un solo sensor. Descubrieron que podían recoger y soltar rápidamente objetos planos, juguetes de metal, cilindros, la parte de doble curva de una cuchara y una bola de hidrogel ultrasuave.
Al reconfigurar la red de sensores utilizando todos para la detección de objetos, también pudieron agarrar cosas más grandes como un plato, una caja y un tazón. Se adhirieron y levantaron objetos planos, cilíndricos, convexos y esféricos compuestos de materiales duros y blandos, incluso cuando los usuarios no agarraron el objeto cerrando las manos.
De cara al futuro, los investigadores prevén que el guante desempeñe un papel en el campo de la robótica blanda para el agarre bajo el agua, las aplicaciones en tecnologías asistidas por el usuario y el cuidado de la salud, y en la fabricación para ensamblar y manipular objetos húmedos.


