Los robots perro ya han poblado el mundo. Es la hora del gato robot. En la universidad de Osaka han desarrollado la primera plataforma robótica para estudiar el sigiloso y eficaz movimiento de los gatos.
Tener un gato es tener un tigre en casa, un felino de extraordinarias habilidades, una de ellas, el modo en que se desplaza. Los gatos pueden alcanzar hasta 58 km por hora, y saltar alturas de 3 metros. Pero no es solo la velocidad y el salto. Caminan de puntillas sobre almohadillas que les confieren cierto aire de fantasma, y una clavícula móvil les permite curvarse como contorsionistas. Además, su cerebro, y su sistema nervioso, tiene que actuar a velocidades prodigiosas. Comprender el modo en que se mueve un gato, es de los mayores retos para los que estudian biomecánica. Y esa es la razón por la que en la Universidad de Osaka han puesto en pie el primer gato robot para investigación.
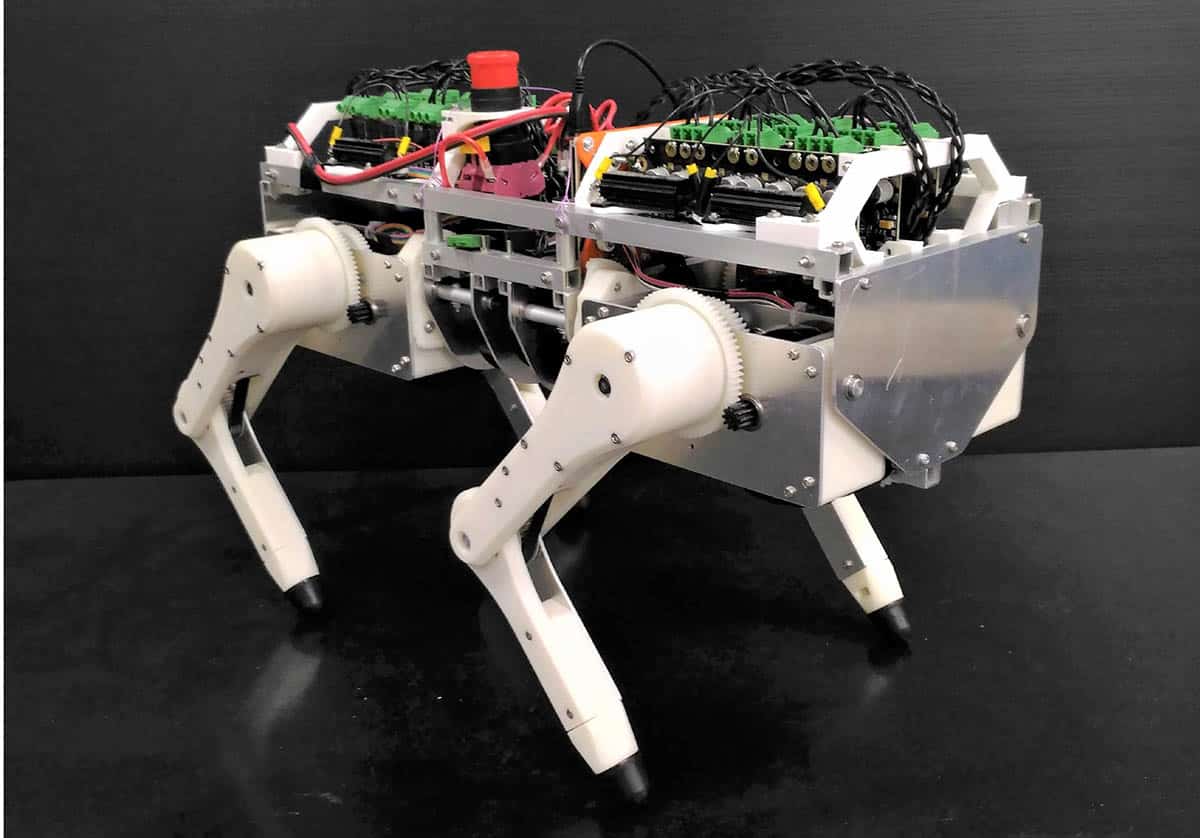
Se trata de un robot cuadrúpedo que puede reproducir la dinámica neuromuscular de los animales, y consigue imitar los movimientos de los gatos. Los resultados de la investigación se han publicado en Frontiers in Neurorobotics.
Para imitar el movimiento de los gatos, han tenido que comprender cómo consiguen los felinos domésticos desplazarse como lo hacen. Se pensaba que sus movimientos elegantes y precisos se articulaban debido a complejos sistemas nerviosos en el cerebro y la médula espinal; sin embargo, investigaciones recientes muestran que solo interviene el circuito reflejo. Es decir, los gatos, más o menos, se desplazan sin pensar.
Dado que los experimentos con animales están estrictamente controlados y restringidos en términos de protección animal, es difícil estudiar su locomoción y cómo actúa su cerebro para dotar a los gatos de una de sus mayores habilidades, el movimiento sigiloso, casi de contorsionista, veloz, ágil y preciso que muestra cuando se desplaza sobre la TV del salón o a la caza de un ratón.
Para poder investigar estos mecanismos de locomoción de los gatos, han reproducido su control motor utilizando robots y simulaciones por computadora. Así ha nacido el primer gato robot para investigación del mundo.
Toyoaki Tanikawa y sus supervisores, el profesor asistente YoichiMasuda y el profesor Masato Ishikawa, desarrollaron un robot de cuatro patas que permite la reproducción del control motor de los animales utilizando computadoras.
El robot puede reproducir las características musculares de los gatos
Este robot cuadrúpedo, que consta de patas que se pueden conducir hacia atrás para reproducir la flexibilidad de los animales y motores con control de par, puede reproducir las características musculares de los animales. Por lo tanto, es posible realizar varios experimentos utilizando este robot en lugar de los propios animales.
Los resultados de la investigación de este grupo beneficiarán tanto al campo de la biología como al de la robótica. Además de aportar nuevos conocimientos a la biología, si los animales robóticos pudieran sustituir a los animales reales en el futuro, más científicos tendrán la oportunidad de estudiar los mecanismos de la locomoción animal en diversas condiciones experimentales.
La aproximación de la estructura de un robot a la de un animal conducirá al desarrollo de tecnologías fundamentales para hacer robots que se muevan y maniobren con la misma eficacia que los animales.
El coautor del artículo, Yoichi Masuda, dice: “Obtener conocimiento sobre los animales sin utilizar animales de experimentación también es importante para los humanos que viven con ellos. Podría convertirse en el primer paso hacia la comprensión de los comportamientos de animales y humanos «.
Al buscar el circuito reflejo que contribuye a la generación de un caminar constante en gatos a través de experimentos robóticos, los investigadores encontraron un circuito reflejo simple que podría producir trayectorias de las piernas y un patrón de marcha constante, al que llamaron «reflejo excitador recíproco entre la cadera y la rodilla «.
En este estudio, los investigadores encontraron que:
- El robot generaba movimientos constantes al caminar simplemente reproduciendo el circuito recíproco en cada pierna del robot.
- La marcha del robot se volvió inestable cuando se cortó el circuito recíproco.
- Cuando se estimuló el circuito excitador mutuo, el circuito produjo un fenómeno llamado ‘prolongación de la fase de apoyo’. Este resultado sugiere que este circuito es un componente importante responsable de caminar en los gatos.
Te puede interesar:
https://quo.eldiario.es/tecnologia/a26355125/inteligencia-artificial-gatitos-fotos-de-internet-adorables/



HUIO