Vídeo: El nacimiento de los robots-salamandra

Las salamandras son capaces de caminar en entornos sumamente complejos. Científicos japoneses han investigado sus habilidades para aplicarlas a robots
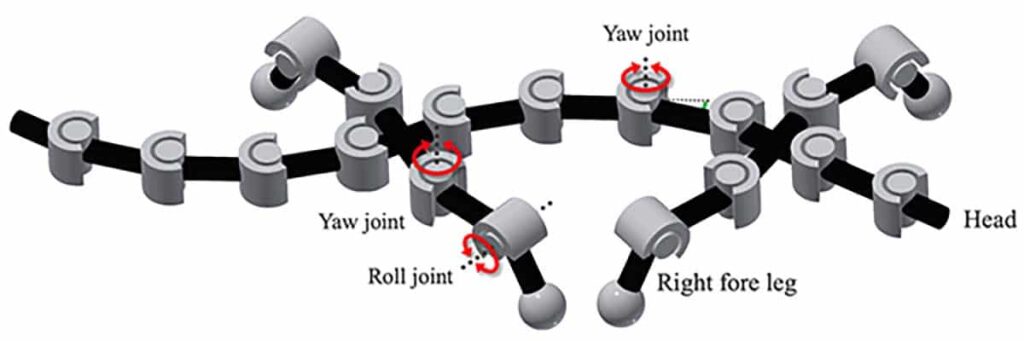
En este vídeo muestran el modelo de robot-salamandra. El tronco tiene 10 articulaciones giratorias y cada pierna tiene dos articulaciones también giratorias. Se desplaza imitando los movimientos de la salamandra real:
El desplazamiento de los robots a día de hoy sigue siendo un desafío. La idea de que sean humanoides tiene interés entre quienes desarrollan robots artificiales, pero la mayoría de los desarrollos en marcha tratan de imitar a los animales. Hace unos meses publicamos en QUO el prototipo de gato-robot desarrollado en la universidad de Osaka. Ahora, el modelo a imitar son las salamandras.
Las salamandras gozan del privilegio de vivir a media entre la tierra y el agua. En su vida adulta prefiere estar sobre la superficie terrestre la mayoría del tiempo, solo regresa al agua para depositar los huevos. Para desplazarse, utilizan las 4 patas, muy cortas, con 4 o 5 dedos cada una. Puede caminar por encima y entre espacios de rocas y vegetación para ocultarse de los depredadores.
Investigadores de la Universidad de Tohoku y el Instituto Federal Suizo de Tecnología en Lausana, con el apoyo del Programa de Ciencias Human Frontier, han decodificado los complejos mecanismos de control motor que emplean las salamandras para caminar
Los investigadores confían en que su descubrimiento ayudará al desarrollo de robots que pueden moverse con gran agilidad y adaptabilidad al cambiar de manera flexible los patrones de coordinación cuerpo-extremidad.
Sus hallazgos se han publicado en la revista Frontiers in Neurorobotics.
Las salamandras pueden moverse en entornos complejos, impredecibles y no estructurados. La impresionante habilidad se debe a su coordinación cuerpo-extremidad. Su sistema nervioso es más simple que el de los mamíferos y cambian su patrón de caminar según la velocidad a la que se mueven.
Este es un esquema de sus movimientos

Para decodificar el movimiento de la salamandra, los investigadores dirigidos por el profesor Akio Ishiguro del Instituto de Investigación de Comunicación Eléctrica de la Universidad de Tohoku modelaron matemáticamente el sistema nervioso de la salamandra y simularon físicamente el modelo.
La salamandra es un ejemplar excelente para estudiar los mecanismos de coordinación cuerpo-extremidad. Es un anfibio que usa cuatro patas y camina balanceándose de izquierda a derecha en un movimiento conocido como ondulación.
Su sistema nervioso es más simple que el de los mamíferos y cambian su patrón de caminar según la velocidad a la que se mueven.
Para decodificar el movimiento de la salamandra, los investigadores dirigidos por el profesor Akio Ishiguro del Instituto de Investigación de Comunicación Eléctrica de la Universidad de Tohoku modelaron matemáticamente el sistema nervioso de la salamandra y simularon físicamente el modelo.
Al hacer el modelo, los investigadores plantearon la hipótesis de que las piernas y el cuerpo están controlados para soportar otros movimientos al compartir información sensorial. Luego reprodujeron las transiciones de la marcha dependientes de la velocidad de las salamandras a través de simulaciones por computadora.
"Esperamos que este hallazgo proporcione información sobre el mecanismo esencial detrás de la locomoción adaptable y versátil de los animales", explica Ishiguro.
Te puede interesar:
TEO: El primer humanoide del futuro
Si quieres conocer otros artículos parecidos a Vídeo: El nacimiento de los robots-salamandra puedes visitar la categoría Robots.

Nace EVA: La primera generación de robots con emociones

Ya es posible comprar el exoesqueleto español para niños
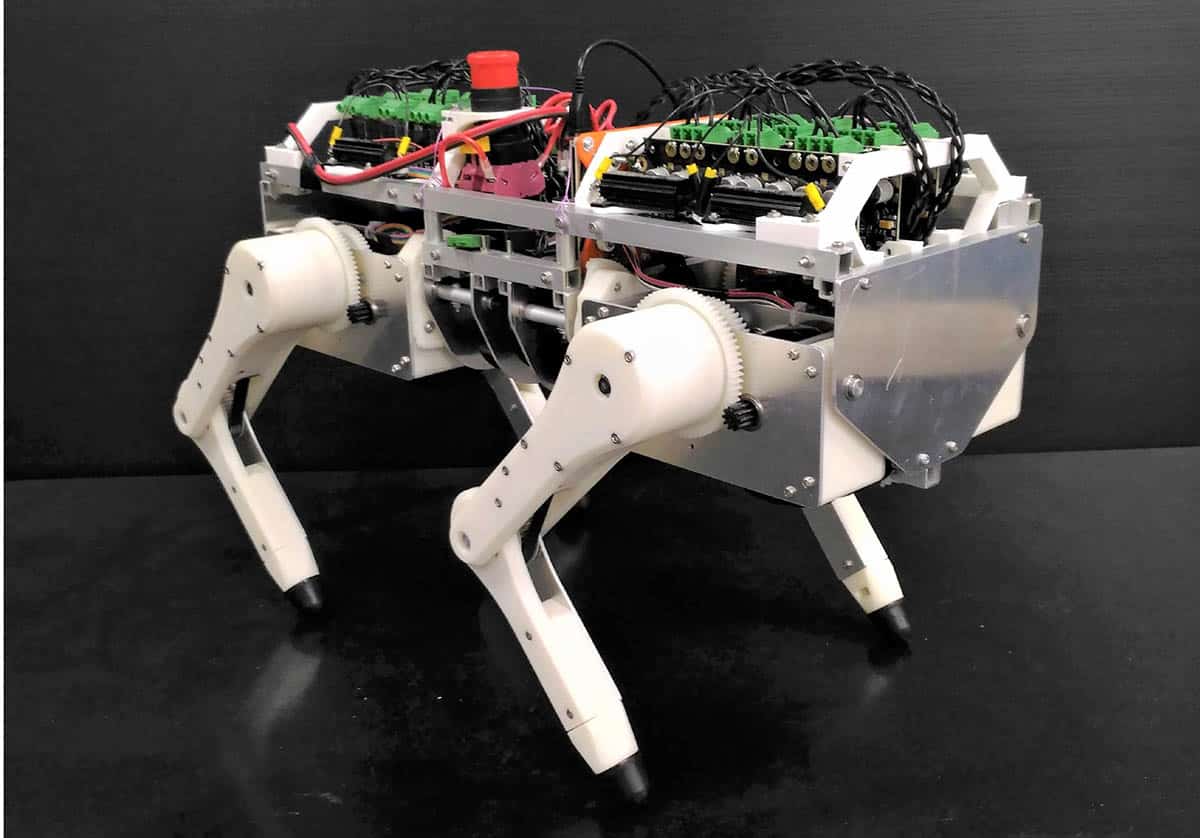
El primer gato robot para investigar sus increíbles movimientos
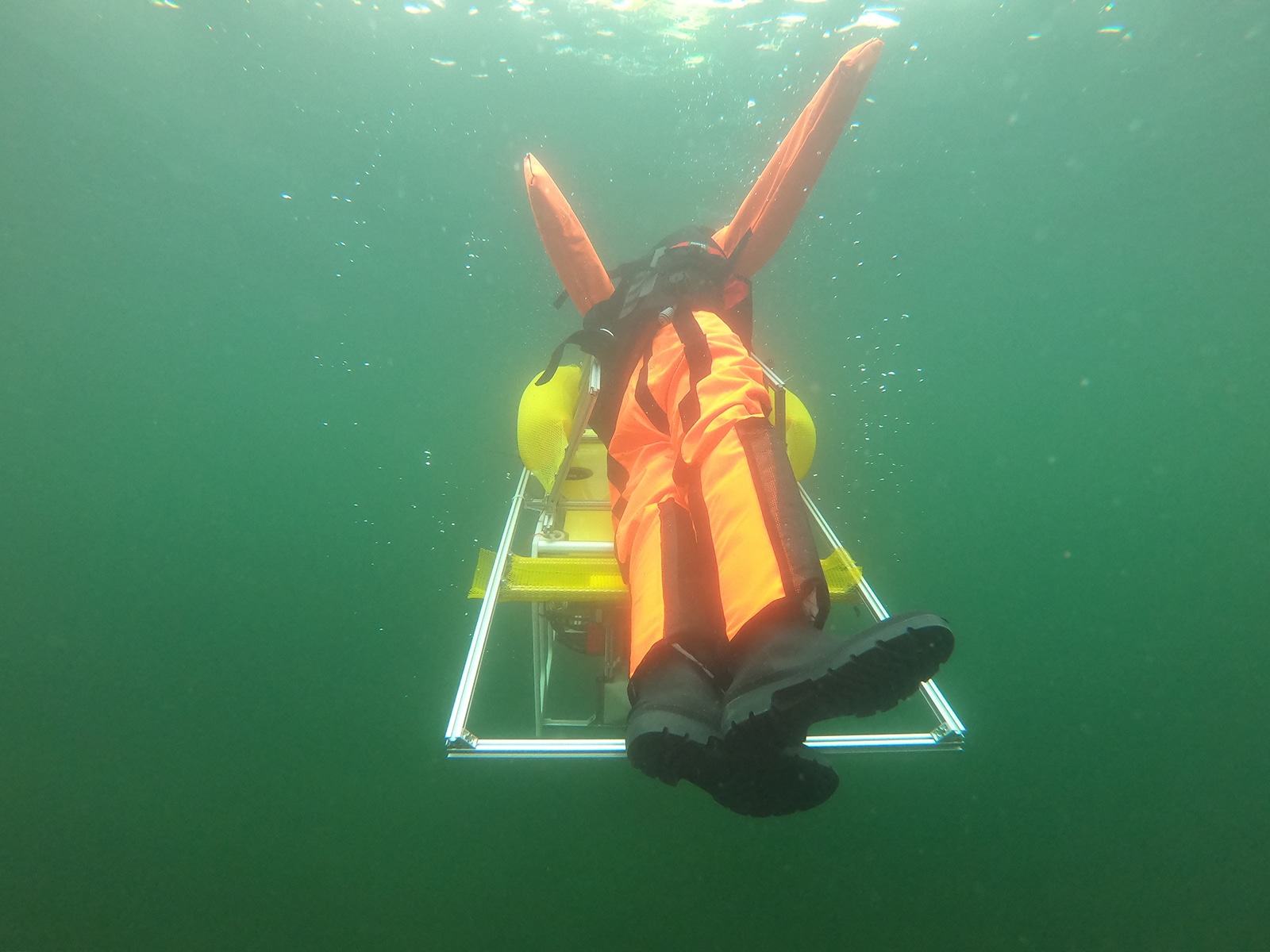
El primer robot socorrista para rescate en piscinas

Robot Humanoide Realista con Inteligencia Artificial: "Llamadme Euclides"

Continúa Leyendo