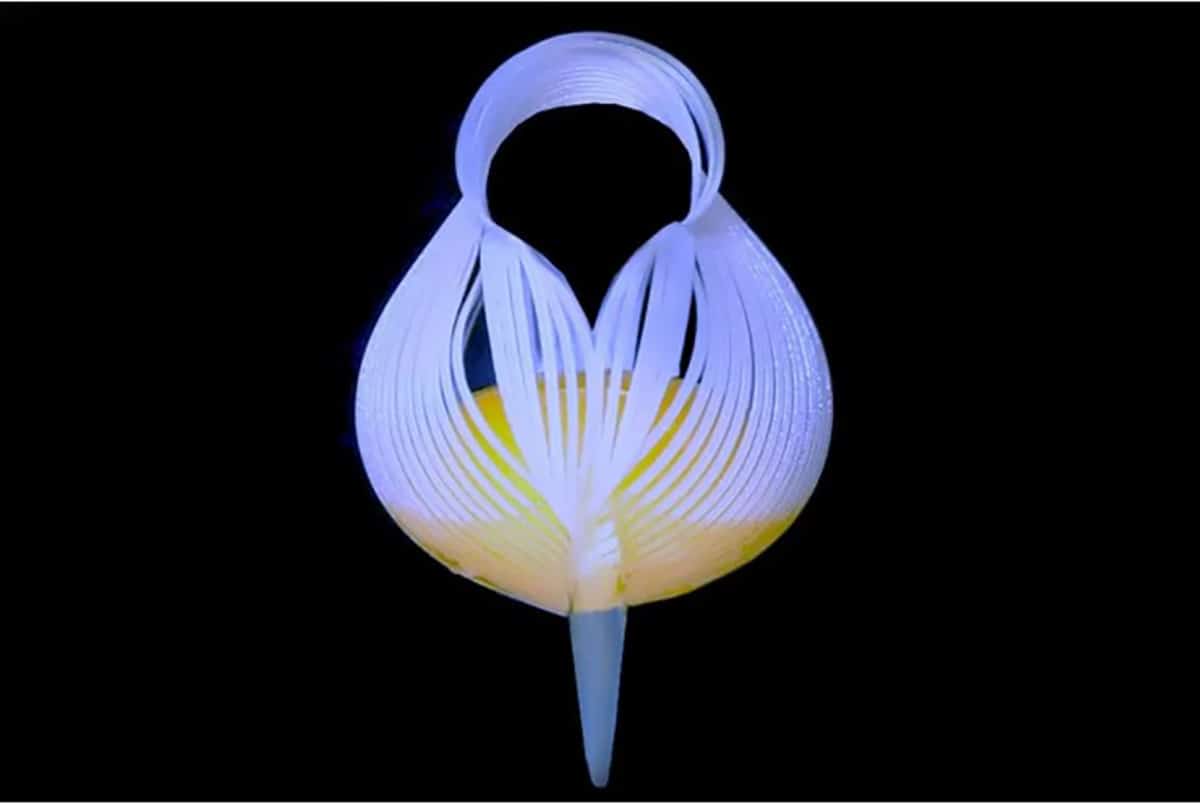
Es una pinza robótica blanda y tan sensible que pueda coger lo más delicado, como una yema de huevo, sin dañarlo. La pinza está hecha de una hoja de kirigami (técnica japonesa de plegado y corte de papel)
Imagen superior: Hong et al, Nature Comm (2000)
Ya se han desarrollado robots que usan dedos de goma blandos para agarrar artículos como frutas, pero ¿qué pasa con los objetivos que son aún más delicados? ¿Como, digamos, una yema de huevo cruda?
Investigadores de la Universidad Estatal de Carolina del Norte han desarrollado un nuevo tipo de pinza que algún día podría ayudar a las máquinas a recoger incluso los elementos más frágiles, incluidas las yemas. Inspirados en el arte japonés del kirigami (como el origami, pero doblas y cortas el papel), su pinza está hecha de láminas planas de material cortadas con ranuras paralelas. Cuando se separan los extremos de la hoja, la pinza se convierte en una esfera 3D que se puede usar para agarrar objetos con suavidad y precisión, desde peces vivos hasta cabello humano.
La clave del diseño (que puedes ver en acción en el video a continuación) es que aplica una presión mínima sobre su objetivo y lo encierra dentro de la forma de kirigami.
“Nuestras pinzas esencialmente rodean el objeto y lo levantan”
«Las pinzas convencionales agarran un objeto con firmeza, agarran las cosas ejerciendo presión sobre ellas», dijo en un comunicado de prensa Jie Yin, profesor asociado de NC State y uno de los investigadores involucrados en el proyecto . “Eso puede plantear problemas al intentar agarrar objetos frágiles, como las yemas de huevo. Pero nuestras pinzas esencialmente rodean un objeto y luego lo levantan, de manera similar a la forma en que ahuecamos las manos alrededor de un objeto. Esto nos permite ‘agarrar’ y mover incluso objetos delicados, sin sacrificar la precisión”.
El trabajo de los investigadores, que se publicó en un artículo de acceso abierto en Nature Communications , se basa en gran medida en su capacidad para predecir la forma final de una pinza a partir de la forma de la hoja de kirigami original. Entonces, por ejemplo, una hoja de kirigami 2D con un borde circular, cuando se corta correctamente, se doblará en una esfera. Usando un software de simulación 3D, pudieron crear prototipos rápidamente de una serie de pinzas diferentes antes de finalizar su diseño.
Este trabajo de prueba de concepto aún no está listo para usarse en entornos comerciales, pero los ingenieros dicen que están trabajando en el próximo paso del desarrollo de la tecnología. “Ahora estamos en el proceso de integrar esta técnica en tecnologías de robótica suave para abordar los desafíos industriales”, dice Yin. «Estamos abiertos a trabajar con socios de la industria para explorar aplicaciones adicionales y encontrar formas de llevar este enfoque del laboratorio al uso práctico».


